

四軸飛行器是近來在專業(yè)與非專業(yè)領(lǐng)域都非常火爆的技術(shù)產(chǎn)品。下面這篇文章針對(duì)四軸飛行器無(wú)位置傳感器無(wú)刷直流電機(jī)的驅(qū)動(dòng)控制,設(shè)計(jì)開發(fā)了三相六臂全橋驅(qū)動(dòng)電路及控制程序。設(shè)計(jì)采用ATMEGA16單片機(jī)作為控制核心,利用反電勢(shì)過零點(diǎn)檢測(cè)輪流導(dǎo)通驅(qū)動(dòng)電路的6個(gè)MOSFET實(shí)現(xiàn)換向;直流無(wú)刷電機(jī)控制程序完成MOSFET上電自檢、電機(jī)啟動(dòng)軟件控制,PWM電機(jī)轉(zhuǎn)速控制以及電路保護(hù)功能。該設(shè)計(jì)電路結(jié)構(gòu)簡(jiǎn)單,成本低、電機(jī)運(yùn)行穩(wěn)定可靠,實(shí)現(xiàn)了電機(jī)連續(xù)運(yùn)轉(zhuǎn)。近年來,四軸飛行器的研究和應(yīng)用范圍逐步擴(kuò)大,它采用四個(gè)無(wú)刷直流電機(jī)作為其動(dòng)力來源。無(wú)刷直流電機(jī)為外轉(zhuǎn)子結(jié)構(gòu),直接驅(qū)動(dòng)螺旋槳高速旋轉(zhuǎn)。
無(wú)刷直流電機(jī)的驅(qū)動(dòng)控制方式主要分為有位置傳感器和無(wú)位置傳感器的控制方式兩種。由于在四軸飛行器中的要求無(wú)刷直流電機(jī)控制器要求體積小、重量輕、高效可靠,因而采用無(wú)位置傳感器的無(wú)刷直流電機(jī)。本文采用的是朗宇X2212 kv980無(wú)刷直流電機(jī)。無(wú)刷直流電機(jī)驅(qū)動(dòng)控制系統(tǒng)包括驅(qū)動(dòng)電路和系統(tǒng)程序控制兩部分。采用功率管的開關(guān)特性構(gòu)成三相全橋驅(qū)動(dòng)電路,之后使用DSP作為主控芯片,借助其強(qiáng)大的運(yùn)算處理能力,實(shí)現(xiàn)電機(jī)的啟動(dòng)與控制,但電路結(jié)構(gòu)復(fù)雜成本高,缺乏經(jīng)濟(jì)性。直流無(wú)刷電機(jī)的換向采用反電勢(shì)過零檢測(cè)法,一旦檢測(cè)到第三相的反電勢(shì)過零點(diǎn)就為換向做準(zhǔn)備。反電勢(shì)過零檢測(cè)采用虛擬中性點(diǎn)的方法,通過檢測(cè)電機(jī)各相的反電勢(shì)過零點(diǎn)來判斷轉(zhuǎn)子位置。而基于電機(jī)三相繞組端電壓變化規(guī)律的電機(jī)電流換向理論,可以大大提高系統(tǒng)控制精度。
本文無(wú)刷直流電機(jī)的驅(qū)動(dòng)電路采用三相六臂全橋電路,控制電路的管理控制芯片采用ATmega 16單片機(jī)實(shí)現(xiàn),以充分發(fā)揮其高性能、資源豐富的特點(diǎn),因而外圍電路結(jié)構(gòu)簡(jiǎn)單。無(wú)刷直流電機(jī)采用軟件啟動(dòng)和PWM速度控制的方式,實(shí)現(xiàn)電機(jī)的啟動(dòng)和穩(wěn)定運(yùn)行,大大提高四軸飛行器無(wú)刷直流電機(jī)的調(diào)速和控制性能。
三相六臂全橋驅(qū)動(dòng)電路
無(wú)刷直流電機(jī)驅(qū)動(dòng)控制電路如圖1 所示。該電路采用三相六臂全橋驅(qū)動(dòng)方式,采用此方式可以減少電流波動(dòng)和轉(zhuǎn)矩脈動(dòng),使得電機(jī)輸出較大的轉(zhuǎn)矩。在電機(jī)驅(qū)動(dòng)部分使用6個(gè)功率場(chǎng)效應(yīng)管控制輸出電壓,四軸飛行器中的直流無(wú)刷電機(jī)驅(qū)動(dòng)電路電源電壓為12 V.驅(qū)動(dòng)電路中,Q1~Q3采用IR公司的IRFR5305(P溝道),Q4~Q6為IRFR1205(N 溝道)。該場(chǎng)效應(yīng)管內(nèi)藏續(xù)流二極管,為場(chǎng)效應(yīng)管關(guān)斷時(shí)提供電流通路,以避免管子的反向擊穿,其典型特性參數(shù)見表1.T1~T3 采用PDTC143ET為場(chǎng)效應(yīng)管提供驅(qū)動(dòng)信號(hào)。
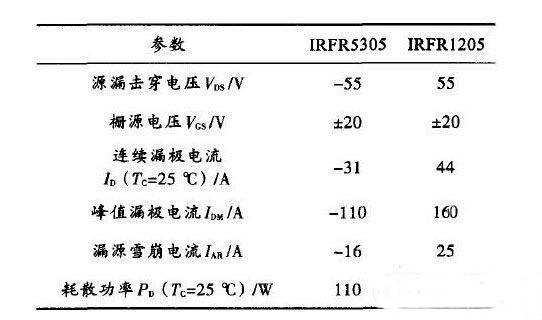
表1 MOSFET管參數(shù)
由圖1 可知,A1~A3 提供三相全橋上橋臂柵極驅(qū)動(dòng)信號(hào),并與ATMEGA16單片機(jī)的硬件PWM驅(qū)動(dòng)信號(hào)相接,通過改變PWM信號(hào)的占空比來實(shí)現(xiàn)電機(jī)轉(zhuǎn)速控制;B1~B3提供下橋臂柵極驅(qū)動(dòng)信號(hào),由單片機(jī)的I/O口直接提供,具有導(dǎo)通與截止兩種狀態(tài)。
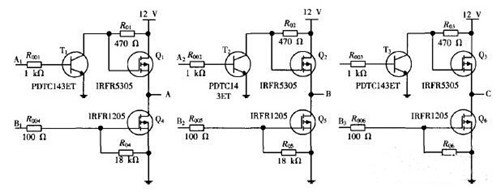
圖1 無(wú)刷直流電機(jī)三相六臂全橋驅(qū)動(dòng)電路
無(wú)刷直流電機(jī)驅(qū)動(dòng)控制采用三相六狀態(tài)控制策略,功率管具有六種觸發(fā)狀態(tài),每次只有兩個(gè)管子導(dǎo)通,每60°電角度換向一次,若某一時(shí)刻AB 相導(dǎo)通時(shí),C 相截至,無(wú)電流輸出。單片機(jī)根據(jù)檢測(cè)到的電機(jī)轉(zhuǎn)子位置,利用MOSFET的開關(guān)特性,實(shí)現(xiàn)電機(jī)的通電控制,例如,當(dāng)Q1、Q5 打開時(shí),AB 相導(dǎo)通,此時(shí)電流流向?yàn)殡娫凑龢O→Q1→繞組A→繞組B→Q5→電源負(fù)極。類似的,當(dāng)MOSFET 打開順序分別為Q1Q5,Q1Q6,Q2Q6,Q2Q4,Q3Q4,Q3Q5時(shí),只要在合適的時(shí)機(jī)進(jìn)行準(zhǔn)確換向,就可實(shí)現(xiàn)無(wú)刷直流電機(jī)的連續(xù)運(yùn)轉(zhuǎn)。反電勢(shì)過零檢測(cè)
無(wú)刷直流電機(jī)能夠正常連續(xù)運(yùn)轉(zhuǎn),就要對(duì)轉(zhuǎn)子位置進(jìn)行檢測(cè),從而實(shí)現(xiàn)準(zhǔn)確換向。電機(jī)轉(zhuǎn)子位置檢測(cè)方式主要有光電編碼盤、霍爾傳感器、無(wú)感測(cè)量三種方式。由于四軸飛行器無(wú)刷直流電機(jī)要求系統(tǒng)結(jié)構(gòu)簡(jiǎn)單、重量輕,因而采用無(wú)位置傳感器的方式,利用第三相產(chǎn)生的感生電動(dòng)勢(shì)過零點(diǎn)時(shí)刻延遲30°換向。雖然該方法在電機(jī)啟動(dòng)時(shí)比較麻煩,可控性差,但由于電路簡(jiǎn)單、成本低,因而適合于在正常飛行過程中不需要頻繁啟動(dòng)的四軸飛行器電機(jī)。
由于無(wú)刷直流電機(jī)的兩相導(dǎo)通模式,因而可以利用不導(dǎo)通的第三相檢測(cè)反電勢(shì)的大小。如圖2反電勢(shì)檢測(cè)電路,中性點(diǎn)N 與單片機(jī)的AIN0 相接,Ain,Bin,Cin分別接單片機(jī)的ADC0,ADC1,ADC2.不停地比較中性點(diǎn)N電壓與A,B,C三相三個(gè)端點(diǎn)電壓的大小,以檢測(cè)出每相感生電動(dòng)勢(shì)的過零點(diǎn)。ATMEGA16單片機(jī)模擬比較器的正向輸入端為AIN0,負(fù)向輸入端根據(jù)ADMUX寄存器的配置而選擇 ADC0,ADC1,ADC2,從而利用了單片機(jī)自帶的模擬比較器的復(fù)用功能。當(dāng)A,B相通電期間,C相反電勢(shì)與中性點(diǎn)N進(jìn)行比較,類似的,就可以成功檢測(cè)出各相的過零事件。
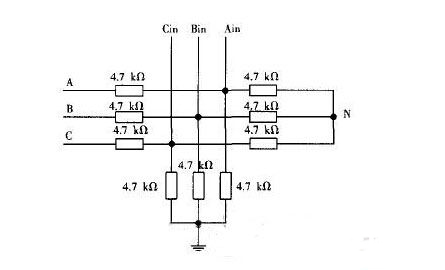
圖2 反電勢(shì)檢測(cè)電路
電機(jī)的反電勢(shì)檢測(cè)出來后,就可以找到反電勢(shì)的過零點(diǎn),在反電勢(shì)過零后延遲30°電角度進(jìn)行換向操作。
驅(qū)動(dòng)電路采用三相六臂全橋電路,MOSFET 作為開關(guān)元件,利用ATmega 16 單片機(jī)作為控制芯片,反電勢(shì)過零檢測(cè)以及軟件啟動(dòng)的控制方式,并延遲30°進(jìn)行換向。正常啟動(dòng)后,單片機(jī)輸出PWM 實(shí)現(xiàn)無(wú)刷直流電機(jī)轉(zhuǎn)速調(diào)節(jié)。同時(shí)設(shè)計(jì)了電壓、電流監(jiān)測(cè)電路,保證系統(tǒng)安全,因而,該系統(tǒng)能夠正常驅(qū)動(dòng)無(wú)位置傳感器無(wú)刷直流電機(jī),并且能夠應(yīng)用于四軸飛行器。
烜芯微專業(yè)制造二極管,三極管,MOS管,橋堆等20年,工廠直銷省20%,4000家電路電器生產(chǎn)企業(yè)選用,專業(yè)的工程師幫您穩(wěn)定好每一批產(chǎn)品,如果您有遇到什么需要幫助解決的,可以點(diǎn)擊右邊的工程師,或者點(diǎn)擊銷售經(jīng)理給您精準(zhǔn)的報(bào)價(jià)以及產(chǎn)品介紹
烜芯微專業(yè)制造二極管,三極管,MOS管,橋堆等20年,工廠直銷省20%,4000家電路電器生產(chǎn)企業(yè)選用,專業(yè)的工程師幫您穩(wěn)定好每一批產(chǎn)品,如果您有遇到什么需要幫助解決的,可以點(diǎn)擊右邊的工程師,或者點(diǎn)擊銷售經(jīng)理給您精準(zhǔn)的報(bào)價(jià)以及產(chǎn)品介紹