

為了保證某些重要負(fù)荷在系統(tǒng)外部故障時的正常供電,出現(xiàn)了一種分布式電源與負(fù)荷單獨構(gòu)成小型電力系統(tǒng)的運行方式;分布式電源與負(fù)荷構(gòu)成的小系統(tǒng)稱為微型電網(wǎng)(微網(wǎng)),微網(wǎng)的電壓等級在400V以下,即為配電網(wǎng)電壓等級。外部無故障時,微網(wǎng)與主網(wǎng)(配電網(wǎng))連接,這種運行狀態(tài)稱為聯(lián)網(wǎng)運行;外部故障時,微網(wǎng)與主網(wǎng)解列,這種運行方式稱為孤島運行。當(dāng)微網(wǎng)中的總發(fā)電容量小于總負(fù)荷需求時,對于長期的外部故障,孤島運行時應(yīng)將次要負(fù)荷切除,但是對于幾秒就能恢復(fù)的瞬時故障。從供電穩(wěn)定性和經(jīng)濟性的角度來看,這對次要負(fù)荷不利。因此,本文提出在外部故障后,用超級電容器向孤島運行的微網(wǎng)提供短時功率缺額,維持所有負(fù)荷并等待重合于主網(wǎng)。文中用理論和仿真證明了此方法的合理性。
1.微網(wǎng)建模
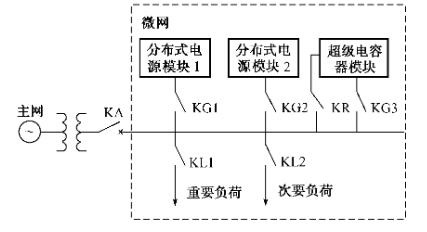
本文在MATLAB軟件中的Simulink環(huán)境下建立模型,系統(tǒng)簡化模型見圖1。當(dāng)KA閉合時。微網(wǎng)處于聯(lián)網(wǎng)運行狀態(tài);當(dāng)微網(wǎng)外部故障時,KA打開。微網(wǎng)進入孤島運行。
系統(tǒng)簡化模型
圖1 系統(tǒng)簡化模型
元件參數(shù)說明如下:
(l)主網(wǎng)。電壓等級30kV﹐短路容量100MVA,X/R=7。
(2)變壓器。額定容量100kVA,dl1,Yn接法,電壓比30kV/400V,R=0.97Ω,x=35Ω。
(3)重要負(fù)荷。1臺異步鼠籠式電動機,額定狀態(tài)運行時P=39.7kW,Q=38.8kvar,最大負(fù)載轉(zhuǎn)知矩238N.m,額定轉(zhuǎn)速1480r/min,其他參數(shù)為MATLAB提供的典型參數(shù):電阻性負(fù)荷10kW,電機負(fù)荷占總負(fù)荷比例為78.7%。
(4)次要負(fù)荷。1臺異步鼠籠式電動機,額定狀態(tài)運行時P=l6.6kW,Q=13.6kvar.最大負(fù)載轉(zhuǎn)矩98N.m,額定轉(zhuǎn)速1460r/min,其他參數(shù)為MATLAB提供的典型參數(shù);電阻性負(fù)荷6.5kW,電機負(fù)荷占總負(fù)荷比例為70%。
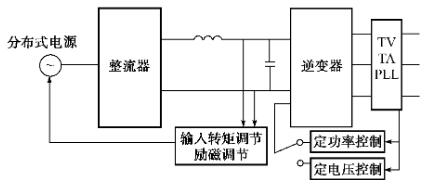
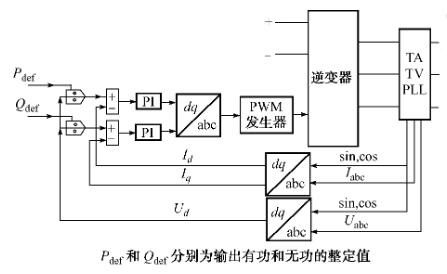
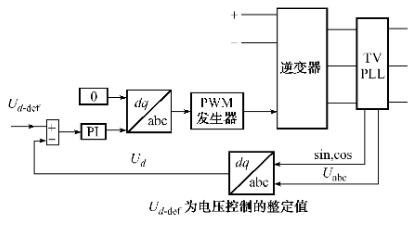
(5)分布式電源模塊。現(xiàn)有的分布式電源有光伏電池、燃料電池、風(fēng)力發(fā)電機。微型燃?xì)廨啓C等,機端電壓或為直流電壓,或為高頻電壓,不能直接接于電網(wǎng);而要經(jīng)過逆變器或者整流器+逆變器等功率變換器件,使電壓幅值頻率和相位與電網(wǎng)相匹配后再并入電網(wǎng)。同時可利用功率變換器件的可控性來實現(xiàn)不同的控制方式,分布式電源模塊簡化圖見圖2。微網(wǎng)中分布式電源模塊的控制方式主要有2種:定功率控制和定電壓控制,在定功率控制方式下,分布式電源向系統(tǒng)注入預(yù)定數(shù)值的有功和無功功率。原理圖見圖3;在定電壓控制方式下,逆變器利用反饋電壓以調(diào)節(jié)交流側(cè)電壓來保證電壓的穩(wěn)定,原理圖見圖4。以下各圖中,TV為電壓互感器,TA為電流互感器,PLL為鎖相環(huán)。
分布式電源采用標(biāo)準(zhǔn)同步發(fā)電機模型,額定功率35kVA,額定電壓600V,電壓頻率100Hz。
(6)超級電容器模塊。超級電容器(組)可以通過整流器從電網(wǎng)吸收能量,也可經(jīng)由逆變器向電網(wǎng)注入功率。超級電容器模塊簡化圖見圖5。微網(wǎng)聯(lián)網(wǎng)運行時,KR閉合,KG3打開,系統(tǒng)向電容器充電;在KA打開。進入孤島運行的同時,KG3閉合﹐KR打開。超級電容器以定電壓控制方式短時維持所有負(fù)荷正常運行,控制原理見圖4。
分布式電源模塊
圖2 分布式電源模塊
恒定輸出功率控制原理
圖3 恒定輸出功率控制原理
恒定電壓控制原理
圖4 恒定電壓控制原理
超級電容器模塊
圖5 超級電容器模塊
2.微網(wǎng)聯(lián)網(wǎng)運行控制
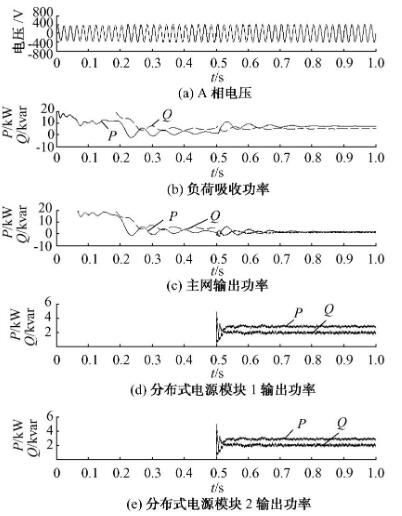
當(dāng)圖1中的開關(guān)KA閉合時。微網(wǎng)即處于聯(lián)網(wǎng)運行狀態(tài),系統(tǒng)的電壓和頻率由主網(wǎng)進行調(diào)節(jié),分布式電源模塊在定功率控制模式下。向系統(tǒng)恒定輸出有功功率28kW,無功功率20kvar,即設(shè)定Pdef=28kW,Qdef= 20kvar,且在不超過發(fā)電機額定容量的前提下,有功功率和無功功率的數(shù)值可以任意調(diào)節(jié)。聯(lián)網(wǎng)運行仿真中,KA保持閉合,0.5s時KGl和KG2閉合,即分布式電源模塊并入電網(wǎng)。仿真結(jié)果見圖6。可以看出,電機的啟動和分布式電源的并網(wǎng)都對電網(wǎng)造成了擾動,前者在0.5s內(nèi)達到穩(wěn)定,后者在0.2s內(nèi)達到穩(wěn)定。穩(wěn)定后分布電源模塊按設(shè)定值向系統(tǒng)注入有功功率和無功功率,主網(wǎng)輸出功率隨之降低,系統(tǒng)電壓無明顯波動。
聯(lián)網(wǎng)運行仿真結(jié)果
圖6 聯(lián)網(wǎng)運行仿真結(jié)果
3.微網(wǎng)孤島運行
3.1微網(wǎng)孤島運行控制
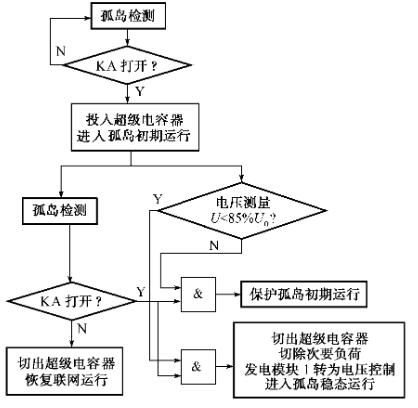
開關(guān)KA因左側(cè)的主網(wǎng)發(fā)生故障而跳開時,微網(wǎng)即進入孤島運行。孤島運行的控制流程見圖7。
孤島運行控制流程
圖7 孤島運行控制流程
孤島檢測裝置檢測開關(guān)KA的狀態(tài),KA打開為”Y”閉合為"N”。孤島初期運行狀態(tài)的定義為:孤島運行中。所有分布式電源模塊以定功率控制。超級電容器以定電壓控制,且不切除任何負(fù)荷的運行狀態(tài)。孤島初期運行發(fā)生在由聯(lián)網(wǎng)進入孤島后的2s左右,其有2種結(jié)束方式:一是外部故障恢復(fù),KA重新閉合,微網(wǎng)恢復(fù)聯(lián)網(wǎng)運行,分布電源模塊控制方式不變,超級電容器由向系統(tǒng)注入能量轉(zhuǎn)為吸收能量,為下一次孤島運行做準(zhǔn)備;二是當(dāng)超級電容器的能量將消耗殆盡,但微網(wǎng)仍未與主網(wǎng)重合時,則切出超級電容器,切除次要負(fù)荷,分布式電源模塊1轉(zhuǎn)為定電壓控制,此時的運行狀態(tài)定義為:孤島穩(wěn)態(tài)運行狀態(tài)。因為微網(wǎng)的電壓會隨著超級電容器能量的消耗而逐漸降低,所以使用電壓測量模塊來決定微網(wǎng)從孤島初期運行轉(zhuǎn)入穩(wěn)態(tài)運行的時機。但為了充分利用超級電容器,并盡可能長時間地保持住所有負(fù)荷來等待與主網(wǎng)重合,且考慮到低壓運行的時間并不太長,本文提出將電壓偏差限定改為+15%。
3.2超級電容器參數(shù)選擇
由于超級電容器單體電壓低,模塊化的也不超過100V,所以仿真中使用多個超級電容器串。并聯(lián)來提高直流電壓和電容值,根據(jù)前述負(fù)荷以及分布式電源模塊參數(shù),要在孤島運行初期保持所有負(fù)荷正常運行,超級電容器模塊輸出視在功率Sc=16.4kVA。
低壓電網(wǎng)中,保護動作時時間為0~2.5s,加上重合閘的時間,取孤島初期運行時間為1.5s,在此期間超級電容器模塊輸出功率為Sc,輸出總的能量Wc至少為:

公式1
三相橋式電壓型逆變電路輸出三相線電壓基波幅值U=0.78Uc(Uc為超級電容器電壓),本文中低壓電網(wǎng)電壓為400V,那么只有在Uc=≥512.8V時超級電容器才能向微網(wǎng)供電,否則就會從微網(wǎng)吸收能量,所以在超級電容器放電1.5s后電壓仍要求在512V之上。超級電容器的電容C取0.2F,電容能量計算公式為:

公式2
式中:UC為電容器初始電壓,UT為放電后的電壓;如前所述,UT要高于512.8V,則可算得:

公式3
考慮一定裕量,取UC為800V。
4.故障仿真分析
4.1瞬時故障仿真
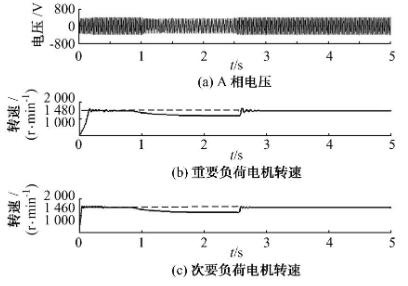
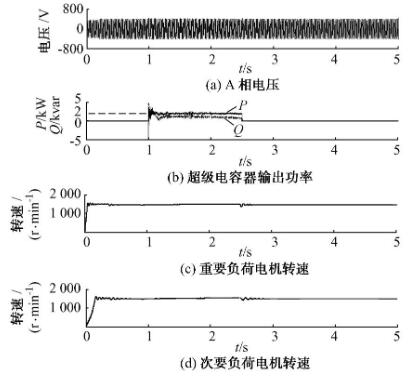
本節(jié)對主網(wǎng)發(fā)生的瞬時故障時,有超級電容器和無超級電容器的情況進行仿真分析,分布式電源模塊在0.5s并入主網(wǎng),均以定功率控制,ls時刻KA因為主網(wǎng)故障而跳開,經(jīng)過1.5s后KA重合,故障過程中分布式電源模塊控制方式不變。仿真波形見圖8圖9。
瞬時故障仿真結(jié)果(無超級電容器)
圖8 瞬時故障仿真結(jié)果(無超級電容器)
瞬時故障仿真結(jié)果(有超級電容器)
圖9 瞬時故障仿真結(jié)果(有超級電容器)
由圖8可見,由于微網(wǎng)總發(fā)電功率小于負(fù)荷需求,當(dāng)沒有超級電容器時微網(wǎng)進入孤島運行后,系統(tǒng)電壓在0.2s內(nèi)迅速降至額定電壓的75%,重要負(fù)荷電機和次要負(fù)荷電機轉(zhuǎn)速分別降至89%和88%額定轉(zhuǎn)速。為了保證重要負(fù)荷正常運行,則必須在進入孤島運行的同時切掉次要負(fù)荷,并將分布式電源模塊1的控制方式轉(zhuǎn)為定電壓控制,即提前進入微網(wǎng)穩(wěn)態(tài)運行。由于僅過1.5s左右微網(wǎng)將與主網(wǎng)重合·所以因瞬時故障而切除次要負(fù)荷,從供電穩(wěn)定性和經(jīng)濟性的角度來看都是不合適的。
有超級電容器時,微網(wǎng)進入孤島運行時即投入超級電容器,并以定電壓控制方式填補功率缺額,保持電壓穩(wěn)定。分布式電源模塊保持定功率控制方式不變。從圖9可以看出,由于超級電容器的存在微網(wǎng)進入孤島時電壓僅在前5個周期大于額定值,第3個周期幅值最大,為額定電壓的104%,之后恢復(fù)為額定值;電動機的最大轉(zhuǎn)速下降了50r/min,在0.1s后恢復(fù)正常轉(zhuǎn)速。2.5s時KA閉合結(jié)束孤島初期運行超級電容器停止對微網(wǎng)的控制轉(zhuǎn)而通過整流器吸收能量,直至達到額定電壓;由于電壓的擾動,電動機的轉(zhuǎn)速發(fā)生衰減振蕩并在0.5s內(nèi)結(jié)束,最大振幅為80r/min。
4.2永久故障仿真
發(fā)生永久故障后,若無超級電容器。則所有負(fù)荷均不能正常運行,而且電壓下降過大時電機轉(zhuǎn)速將逐漸降低而最終堵轉(zhuǎn),只能通過切負(fù)荷進入孤島穩(wěn)態(tài)運行。有超級電容器時,系統(tǒng)控制方式與發(fā)生瞬時故障時相同,即微網(wǎng)進入初期運行。為了最大限度地維持所有負(fù)荷:等待重合到主網(wǎng)。本文且將電壓偏差限定改為±l5%,當(dāng)電壓檢測模塊檢測到系統(tǒng)電壓低于額定電壓的85%時。再切除次要負(fù)荷和超級電容器,分布式電源模塊1改為定電壓控制,進入穩(wěn)態(tài)運行,仿真結(jié)果見圖10。
如圖10所示,在約3.6s時,系統(tǒng)電壓降為額定電壓的85%,因此,控制環(huán)節(jié)在此切除次要負(fù)荷電機和超級電容器,此后系統(tǒng)電壓恢復(fù)到額定值,重要負(fù)荷電機恢復(fù)正常運行,由于設(shè)定電壓最大偏差為15%%,從而造成了重要電機負(fù)荷轉(zhuǎn)速最低降到600r/min,在實際中還應(yīng)根據(jù)電機轉(zhuǎn)速偏差指標(biāo)來定義最大電壓偏差。
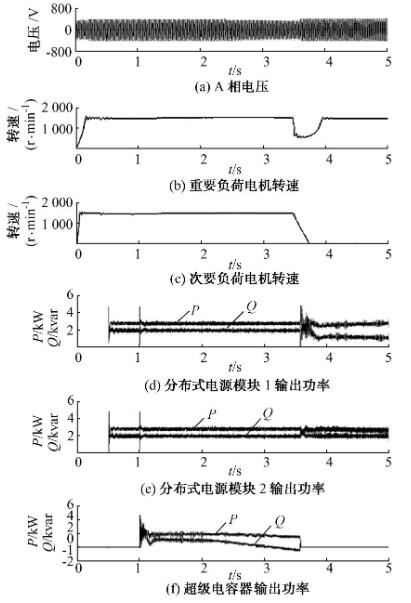
永久故障仿真結(jié)果
圖10 永久故障仿真結(jié)果(有超級電容器)
結(jié)束語
以上就是超級電容器在微型電網(wǎng)中的應(yīng)用介紹了。當(dāng)總發(fā)電功率小于總負(fù)荷的微網(wǎng),有超級電容器時,在進入孤島運行后的2s左右時間內(nèi)進行孤島初期運行——不切負(fù)荷、不調(diào)整分布式電源模塊的控制模式,并由超級電容器補充功率不足。維持系統(tǒng)電壓穩(wěn)定,等待與主網(wǎng)重合。當(dāng)外部故障為瞬時故障時,故障消失后微網(wǎng)恢復(fù)聯(lián)網(wǎng)運行,超級電容器轉(zhuǎn)為從主網(wǎng)吸收能量,為下一次投入做準(zhǔn)備;當(dāng)為永久故障時,在電壓偏差超過額定值之后,再進入孤島穩(wěn)態(tài)運行。仿真結(jié)果證明,超級電容器引入微型電網(wǎng)后,提高了微網(wǎng)抗瞬時故障的能力,最大程度地保證了次要負(fù)荷的運行,提高了供電可靠性和經(jīng)濟性。
〈烜芯微/XXW〉專業(yè)制造二極管,三極管,MOS管,橋堆等,20年,工廠直銷省20%,上萬家電路電器生產(chǎn)企業(yè)選用,專業(yè)的工程師幫您穩(wěn)定好每一批產(chǎn)品,如果您有遇到什么需要幫助解決的,可以直接聯(lián)系下方的聯(lián)系號碼或加QQ/微信,由我們的銷售經(jīng)理給您精準(zhǔn)的報價以及產(chǎn)品介紹
聯(lián)系號碼:18923864027(同微信)
QQ:709211280